Introduction
The purpose of this article is to help readers understand how to use DDR3 memory available on Neso using Xilinx MIG 7 IP core easily. The Xilinx MIG 7 IP core provides users with two interface options: User Interface (a wrapper over Native interface) and the AXI4 Interface. This article will demonstrate how to write to the DDR3 memory on Neso using simple verilog code and then read back the data. The design will compare the data written to DDR3 and the data read back from it. The verification and DDR3 calibration results will be indicated using GPIO pins on Neso GPIO header P4.
Prerequisites
To follow this article, you would need the following:
- Hardware:
- Neso Artix 7 FPGA Board
- Xilinx Platform Cable USB II JTAG debugger (optional)
- Software:
- Xilinx Vivado Suite 2017.3 or newer
Let’s get started
The following steps will walk you through the process of creating simple DDR3 project using Xilinx Vivado.
Step 1:
Download and install Vivado Board Support Package files for Neso from here. Follow the README.md file on how to install Vivado Board Support Package files for Numato Lab boards.
Step 2:
Open Xilinx Vivado Design Suite and select “New Project” from “File” menu. A “New Project” dialog will open. Click “Next” to proceed.
Step 3:
Type in a project name, select a convenient project location and choose “Create project subdirectory” to keep all project files in single folder. In this article, author has used “neso-simple-ddr3-tutorial” as a project name. Click “Next”, select “RTL Project” as project type and select “Do not specify sources at this time”. Click “Next” to proceed.
 Step 4:
Step 4:
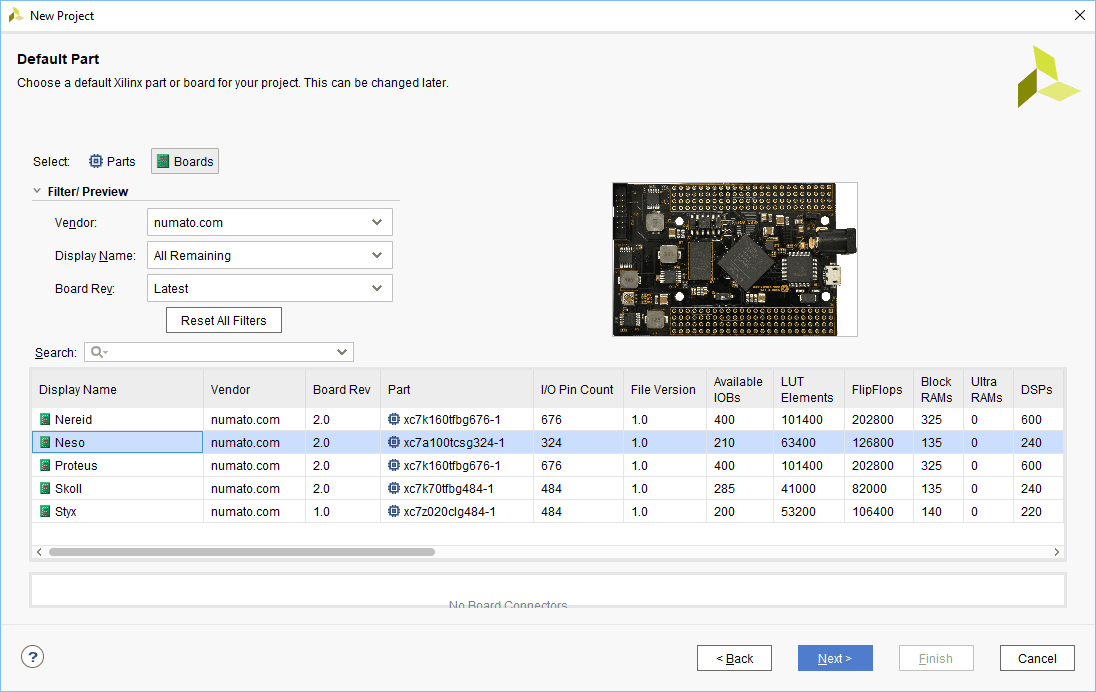
Select “Boards” from “Default Part” tab, choose “numato.com” as Vendor. Select “Neso” and click “Next”. If Neso is not listed, make sure board support files are installed correctly. Click “Finish”. A new Vivado project will open with the selected settings.
Step 5:
Under the “Flow Navigator”, double click on “IP Catalogue” to add necessary IP cores. Search for MIG 7 and double click on “Memory Interface Generator (MIG 7 Series)” to customise.
Step 6:
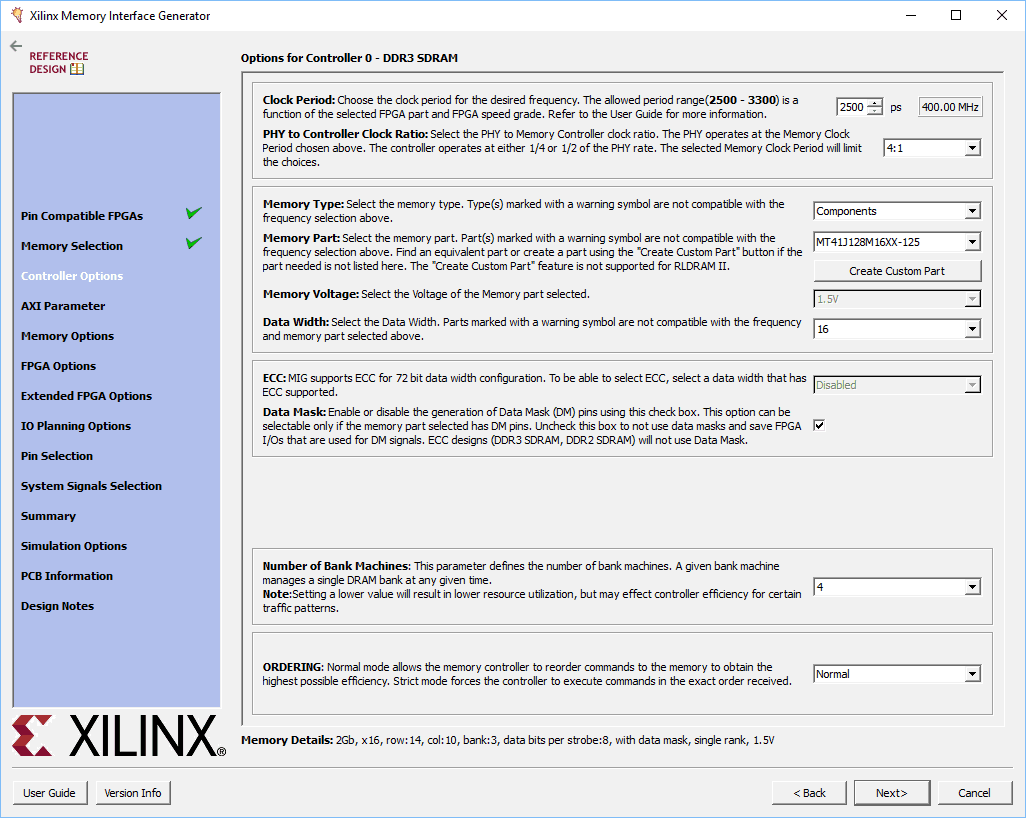
The “Xilinx Memory Interface Generator” configuration window will open. Click “Next”, select component name and de-select “AXI4 Interface”. For this example, “mem” is used as component name. After clicking on “Next” twice, select “DDR3 SDRAM” as Memory. Click “Next”. Select controller options as shown below and Click Next. Select “Input Clock Period” as “5000 ps (200MHz) “, keep remaining settings as default. Click “Next” to proceed.
Step 7:
Select the ‘FPGA options’ as shown below.
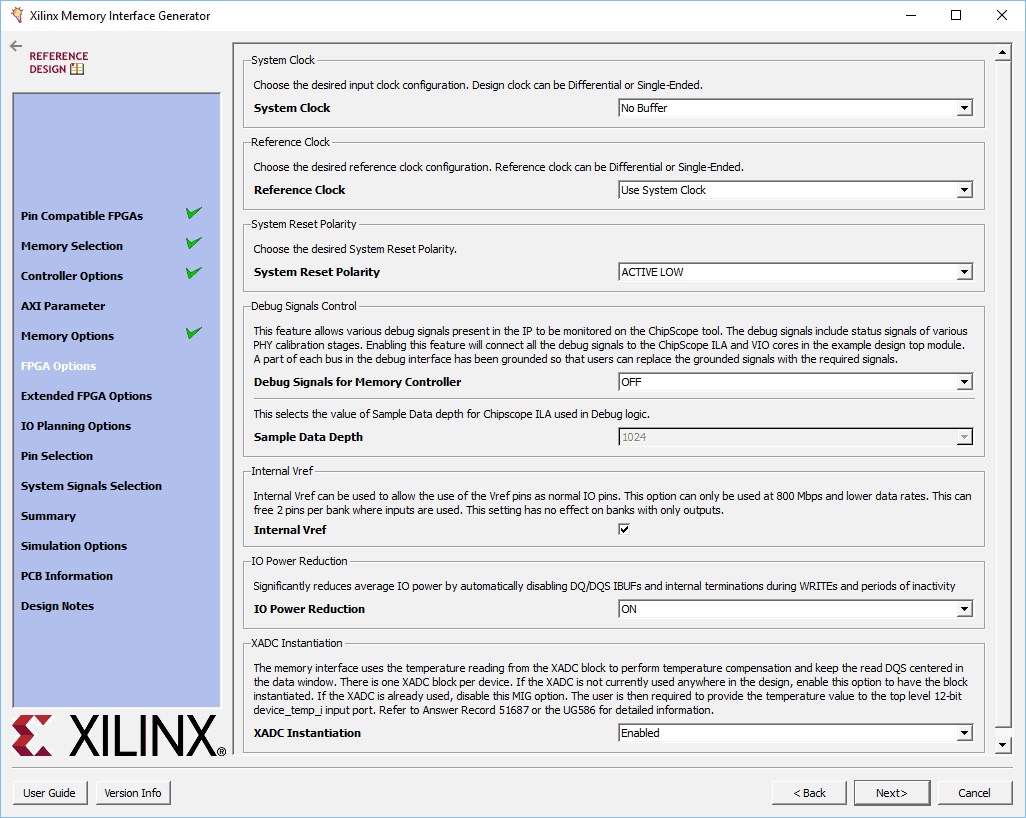
Click Next, choose “Internal Termination Impedance” as “OFF”. Select “Fixed Pin Out” in the next tab and click on “Next”. Assign DDR pins as mentioned in Neso constraints file and validate it by clicking on “Validate”. If the pinout is valid, Click “OK” and “Next” to proceed. Accept the license and click “Next” to proceed. Click on “Generate” to generate IP core with our customised settings.
Step 8:
Search for “Clocking Wizard” IP and double-click on it to customise. Choose component name as “clk_wiz”, select “CLK_IN1” board interface to ‘sys_clock’ and “EXT_RESET_IN” to ‘reset’ in the “Board” tab. In “Clocking Options” choose primary clock port name as “clk_in”, clk_out1 port name as “clk_200”, requested frequency as “200.000”, de-select locked signal and select “Reset Type” as “Active Low”. Click “OK”.
Step 9 :
Create a verilog file with .v extension and copy paste the following code in “neso_ddr3.v” to run simple DDR3 with user interface.
The code uses Xilinx MIG7 IP core and clock wizard IP core in addition to its own logic for interfacing with the MIG 7 IP core. The clock wizard IP is used to generate a 200MHz clock, needed by the MIG 7 IP core, from the 100MHz system clock.
The code basically just implements a simple FSM with six states. Initially, the state machine is in IDLE state waiting for the memory calibration to complete. As soon as the calibration is done, the state machine goes into WRITE state. In this state, the machine waits for the MIG7 IP core to become ready to accept commands and data. When both app_rdy and app_wdf_rdy are asserted by the MIG IP core, it means the core is ready to accept commands and data to write to DDR3. So, the state machine writes data and command to MIG IP core and goes into WRITE_DONE state. In the WRITE_DONE state, the state machine de-asserts the data enable (app_wdf_wren) and command enable (app_en) signals and proceeds to READ state to read back the data it just wrote to the memory. When in the READ state, the state machine commands the MIG IP core to read the data from memory as soon as the MIG IP core is ready to accept new command and then it moves itself to READ_DONE state. When in the READ_DONE state, if app_rd_data_valid signal is asserted, the state machine captures the data and moves to PARK state where it compares the data written to memory with the data read back from memory. If the data matches, led_pass goes HIGH otherwise led_fail goes HIGH.
module neso_ddr3(
input clk_in,
// DDR3 Physical Interface Signals
//Inouts
inout [15:0] ddr3_dq,
inout [1:0] ddr3_dqs_n,
inout [1:0] ddr3_dqs_p,
// Outputs
output [13:0] ddr3_addr,
output [2:0] ddr3_ba,
output ddr3_ras_n,
output ddr3_cas_n,
output ddr3_we_n,
output ddr3_reset_n,
output [0:0] ddr3_ck_p,
output [0:0] ddr3_ck_n,
output [0:0] ddr3_cke,
output [0:0] ddr3_cs_n,
output [1:0] ddr3_dm,
output [0:0] ddr3_odt,
// LEDs to signal pass/fail
output reg led_pass,
output reg led_fail,
output wire led_calib
);
wire calib_done;
reg [27:0] app_addr = 0;
reg [2:0] app_cmd = 0;
reg app_en;
wire app_rdy;
reg [127:0] app_wdf_data;
wire app_wdf_end = 1;
reg app_wdf_wren;
wire app_wdf_rdy;
wire [127:0]app_rd_data;
wire [15:0] app_wdf_mask = 0;
wire app_rd_data_end;
wire app_rd_data_valid;
wire app_sr_req = 0;
wire app_ref_req = 0;
wire app_zq_req = 0;
wire app_sr_active;
wire app_ref_ack;
wire app_zq_ack;
wire ui_clk;
wire ui_clk_sync_rst;
wire sys_clk_i;
reg [127:0] data_to_write = {32'hcafebabe, 32'h12345678,
32'hAA55AA55, 32'h55AA55AA};
reg [127:0] data_read_from_memory = 128'd0;
// Power-on-reset generator circuit.
// Asserts resetn for 1023 cycles, then deasserts
// `resetn` is Active low reset
reg [9:0] por_counter = 1023;
always @ (posedge clk_in) begin
if (por_counter) begin
por_counter <= por_counter - 1 ;
end
end
wire resetn = (por_counter == 0);
// Clock Wizard
// DDR3 core requires 200MHz input clock
// We generate this clock using Xilinx Clocking Wizard IP Core
clk_wiz clk_wiz (
.clk_in (clk_in),
.clk_200 (sys_clk_i),
.resetn (resetn)
);
// Instatiation of MIG core named `mem`
mem mem (
// DDR3 Physical interface ports
.ddr3_addr (ddr3_addr),
.ddr3_ba (ddr3_ba),
.ddr3_cas_n (ddr3_cas_n),
.ddr3_ck_n (ddr3_ck_n),
.ddr3_ck_p (ddr3_ck_p),
.ddr3_cke (ddr3_cke),
.ddr3_ras_n (ddr3_ras_n),
.ddr3_reset_n(ddr3_reset_n),
.ddr3_we_n (ddr3_we_n),
.ddr3_dq (ddr3_dq),
.ddr3_dqs_n (ddr3_dqs_n),
.ddr3_dqs_p (ddr3_dqs_p),
.ddr3_cs_n (ddr3_cs_n),
.ddr3_dm (ddr3_dm),
.ddr3_odt (ddr3_odt),
.init_calib_complete (calib_done),
// User interface ports
.app_addr (app_addr),
.app_cmd (app_cmd),
.app_en (app_en),
.app_wdf_data(app_wdf_data),
.app_wdf_end (app_wdf_end),
.app_wdf_wren(app_wdf_wren),
.app_rd_data (app_rd_data),
.app_rd_data_end (app_rd_data_end),
.app_rd_data_valid (app_rd_data_valid),
.app_rdy (app_rdy),
.app_wdf_rdy (app_wdf_rdy),
.app_sr_req (app_sr_req),
.app_ref_req (app_ref_req),
.app_zq_req (app_zq_req),
.app_sr_active(app_sr_active),
.app_ref_ack (app_ref_ack),
.app_zq_ack (app_zq_ack),
.ui_clk (ui_clk),
.ui_clk_sync_rst (ui_clk_sync_rst),
.app_wdf_mask(app_wdf_mask),
// Clock and Reset input ports
.sys_clk_i (sys_clk_i),
.sys_rst (resetn)
);
localparam IDLE = 3'd0;
localparam WRITE = 3'd1;
localparam WRITE_DONE = 3'd2;
localparam READ = 3'd3;
localparam READ_DONE = 3'd4;
localparam PARK = 3'd5;
reg [2:0] state = IDLE;
localparam CMD_WRITE = 3'b000;
localparam CMD_READ = 3'b001;
assign led_calib = calib_done;
always @ (posedge ui_clk) begin
if (ui_clk_sync_rst) begin
state <= IDLE;
app_en <= 0;
app_wdf_wren <= 0;
end else begin
case (state)
IDLE: begin
if (calib_done) begin
state <= WRITE;
end
end
WRITE: begin
if (app_rdy & app_wdf_rdy) begin
state <= WRITE_DONE;
app_en <= 1;
app_wdf_wren <= 1;
app_addr <= 0;
app_cmd <= CMD_WRITE;
app_wdf_data <= data_to_write;
end
end
WRITE_DONE: begin
if (app_rdy & app_en) begin
app_en <= 0;
end
if (app_wdf_rdy & app_wdf_wren) begin
app_wdf_wren <= 0;
end
if (~app_en & ~app_wdf_wren) begin
state <= READ;
end
end
READ: begin
if (app_rdy) begin
app_en <= 1;
app_addr <= 0;
app_cmd <= CMD_READ;
state <= READ_DONE;
end
end
READ_DONE: begin
if (app_rdy & app_en) begin
app_en <= 0;
end
if (app_rd_data_valid) begin
data_read_from_memory <= app_rd_data;
state <= PARK;
end
end
PARK: begin
if (data_to_write == data_read_from_memory) begin
led_pass <= 1;
end else if (data_to_write != data_read_from_memory) begin
led_fail <= 1;
end
end
default: state <= IDLE;
endcase
end
end
endmodule // top
Step 10:
Create a constraints file and copy-paste the following constraints.
set_property -dict {PACKAGE_PIN A14 IOSTANDARD LVCMOS33} [get_ports led_calib]
set_property -dict {PACKAGE_PIN A13 IOSTANDARD LVCMOS33} [get_ports led_pass]
set_property -dict {PACKAGE_PIN D13 IOSTANDARD LVCMOS33} [get_ports led_fail]
Step 11:
Generate Bitstream by clicking on “Generate Bitstream”. Once the Bitstream is generated successfully, power up Neso and program the device.
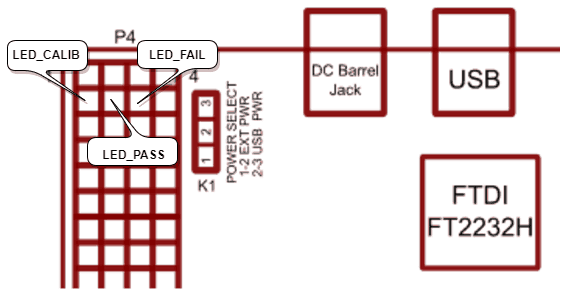
FPGA pins A14, A13 and D13 which are in 2nd row of GPIO Header P4 are connected to led_calib, led_pass and led_fail signals respectively. After programming make sure that led_calib (calibration done) signal goes HIGH indicating that initial calibration completed successfully. Also, led_pass should go HIGH indicating that data was written to memory and read back successfully. led_fail should stay LOW since led_fail being HIGH indicates failed attempt to write and read data from memory. The below picture illustrates the FPGA pins on the Neso Artix 7 FPGA Module GPIO header used for status indication.
You can use either LED with series resistor or multimeter to measure output of led_calib, led_pass and led_fail signals. If you observe led_calib and led_pass LEDs high and led_fail LED stays low, then your Neso Artix 7 DDR3 example design worked. Congratulations!